
2022年5月4日
Cytron PS2シールドをArduinoで動かしてみた

PS2コントローラを手軽に使えるArduino Shieldを動かしてみた。操作性が良いプレステ2のコントローラを使って、ロボットを制御できるようになります。
準備
使用するハードウェア
- Arduino Uno [suzaku-shop code=’Pololu-2191′]
- Cytron PS2 SHIELD [suzaku-shop code=’CYTRON-SHIELD-PS2′]
- PS2コントローラー
- USBケーブル (Arduino書き込み・通信用)
[itemlink post_id=”245″]
開発環境
- Windows7
- ArduinoIDE 1.8.5
ArduinoIDEへライブラリの追加
Cytron社が出している専用ライブラリがGithubで公開されているのでダウンロードします。
https://github.com/CytronTechnologies/Cytron_PS2Shield
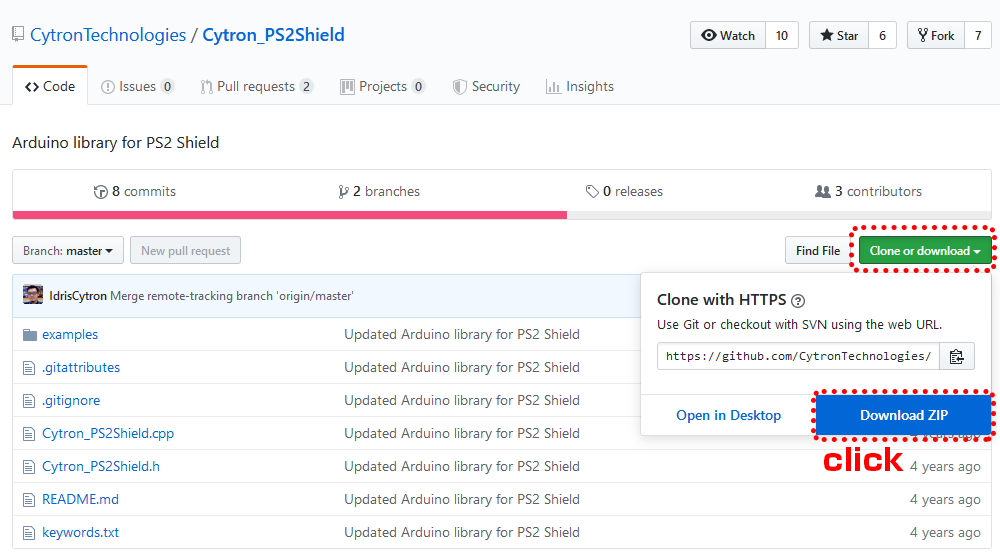
ArduinoIDEを開いて、上のバーの”スケッチ”→”ライブラリをインクルード”→”Zip形式のライブラリをインストール…”を押して先ほどダウンロードしたファイルを選択します。
接続方法

今回使ったのはシールド版なので差し込むだけで接続は完了です。
関数とボタンの割り当て
ボタン系
// readButton関数 name.readButton(引数); // "name"は、宣言時の任意の文字列 // 戻り値は、unsigned char型
この関数に調べたいボタンの引数を代入することで、ボタンが押されているか押されていないか判定できます。
戻り値
- 0: 押されている状態
- 1: 押されていない状態
引数一覧(ボタン一覧)
- PS2_SELECT
- PS2_JOYSTICK_LEFT
- PS2_JOYSTICK_RIGHT
- PS2_START
- PS2_LEFT
- PS2_RIGHT
- PS2_UP
- PS2_DOWN
- PS2_LEFT1
- PS2_LEFT2
- PS2_RIGHT1
- PS2_RIGHT2
- PS2_TRIANGLE
- PS2_CIRCLE
- PS2_CROSS
- PS2_SQUARE
ジョイスティック系
先ほどと同じreadButton関数に、調べたいスティックの軸の引数を代入することで、現在のスティックの座標を調べることができます。
戻り値
- 0~255 (AXIS系)
- 0~100 (UP, DOWN, LEFT, RIGHT系)
引数一覧(ジョイスティック)
- PS2_JOYSTICK_LEFT_X_AXIS
- PS2_JOYSTICK_LEFT_Y_AXIS
- PS2_JOYSTICK_RIGHT_X_AXIS
- PS2_JOYSTICK_RIGHT_Y_AXIS
- PS2_JOYSTICK_RIGHT_UP
- PS2_JOYSTICK_RIGHT_DOWN
- PS2_JOYSTICK_RIGHT_LEFT
- PS2_JOYSTICK_RIGHT_RIGHT
- PS2_JOYSTICK_LEFT_UP
- PS2_JOYSTICK_LEFT_DOWN
- PS2_JOYSTICK_LEFT_LEFT
- PS2_JOYSTICK_LEFT_RIGHT
モーター系
// vibrate関数 name.vibrate(motor,value); // "name"は、宣言時の任意の文字列 // 戻り値なし
関数に、下の表の引数を代入すると、コントローラのモーターを動かすことができます。
| 引数 | motor | value |
|---|---|---|
| Bigmotor | 0 | 0~255 |
| Smallmotor | 1 | 0 or 1 |
プログラム
簡単に動作テストのコードを書いてみました。
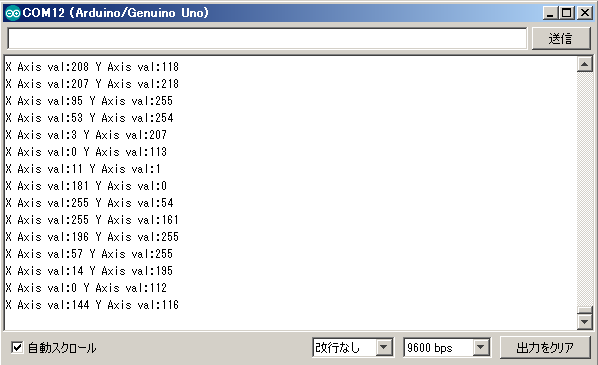
左スティックのx座標とy座標の値がシリアルモニタに表示されます。またセレクトボタンを押すとArduino Uno上のLEDが点灯します。
#include <Cytron_PS2Shield.h>
#include <SoftwareSerial.h>
Cytron_PS2Shield ps2(2,3);
/* 初期設定 */
void setup() {
ps2.begin(9600);
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, LOW);
}
/* メイン */
void loop() {
//check select_button
if(ps2.readButton(PS2_SELECT)==0){
digitalWrite(LED_BUILTIN,HIGH);
}
else{
digitalWrite(LED_BUILTIN,LOW);
}
//check LEFT_X_joystick
Serial.print("X Axis val:");
Serial.print(ps2.readButton(PS2_JOYSTICK_LEFT_X_AXIS));
Serial.print(" ");
Serial.print("Y Axis val:");
Serial.println(ps2.readButton(PS2_JOYSTICK_LEFT_Y_AXIS));
delay(50);
}
動作確認
ボタンもスティックも正常に動作しました。
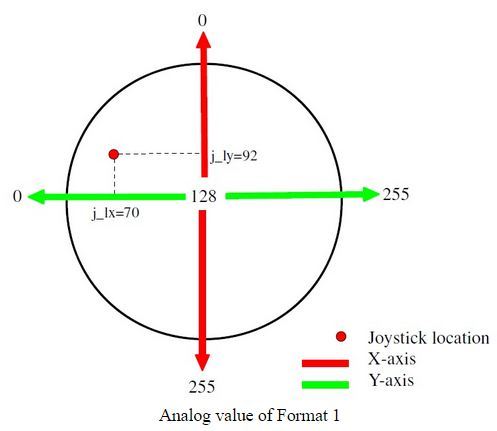
シリアルモニタでジョイスティックの値を確認すると、x座標y座標共に0~255の間で値が返ってくることが分かりました。触っていないときは中央値である128が返ってきます。以下の画像はデーシートから引用した画像です。
接続から動作までArduinoなら簡単にできました。Robo-Oneなどのロボットを動かすときに役立ちそうですね。
参考サイト
[itemlink post_id=”245″]