
2022年5月4日
Pololu ハイパワーシンプルモータコントローラG2
Linux シリアル Pythonサンプル(Raspberry Pi)
シンプルモータコントローラG2のTTLシリアル通信を使い、Raspberry Piでモータ制御をします。
シリアル動作モード
- ボーレート 9,600 bps
- バイナリコマンド方式
- CRC無効モード
Pythonでは、pySerial ライブラリを使用しています。
コードを実行したときに、“ImportError: No module named serial” や “ModuleNotFoundError: No module named ‘serial’”と表示されるときは、pySerialライブラリがインストールされていませんので、インストールをしてください。
Raspberry Piと接続
USB(仮想シリアル)接続
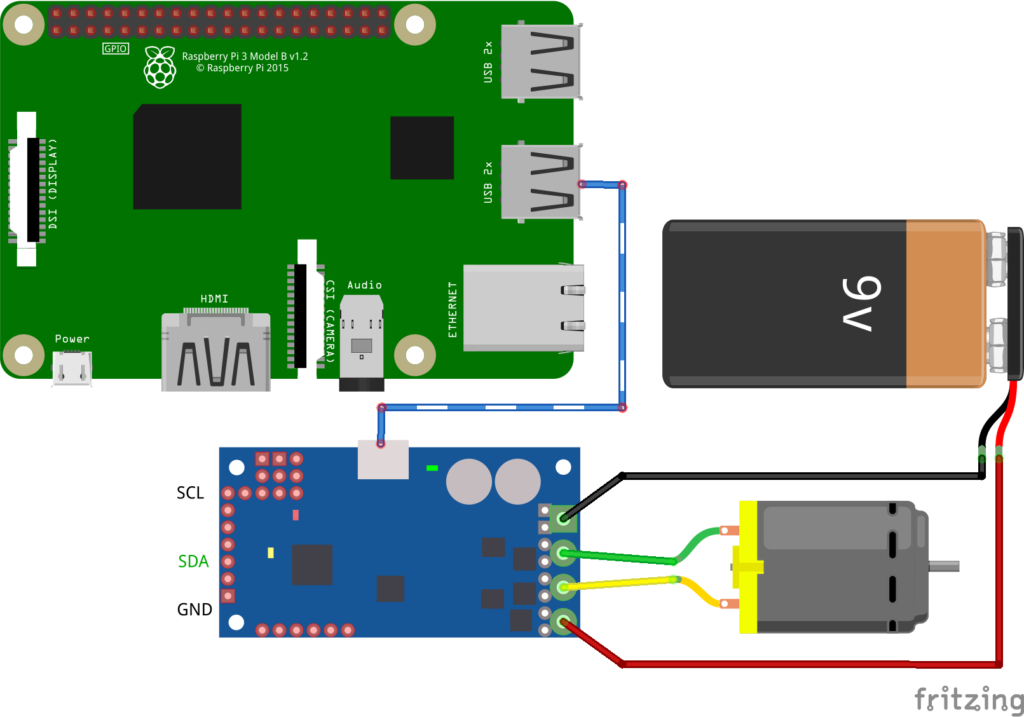
Raspberry Piとシンプルモータコントローラを、USBで接続します。USBドライバが自動的にロードされ、仮想シリアルポートとして動作します。
USBで接続したとき、Raspberry Piのシリアルポートは、/dev/ttyUSB0 になります。複数つないでいる時は、/dev/ttyUSB1と最後の数字が増えていきます。
TTLシリアル接続
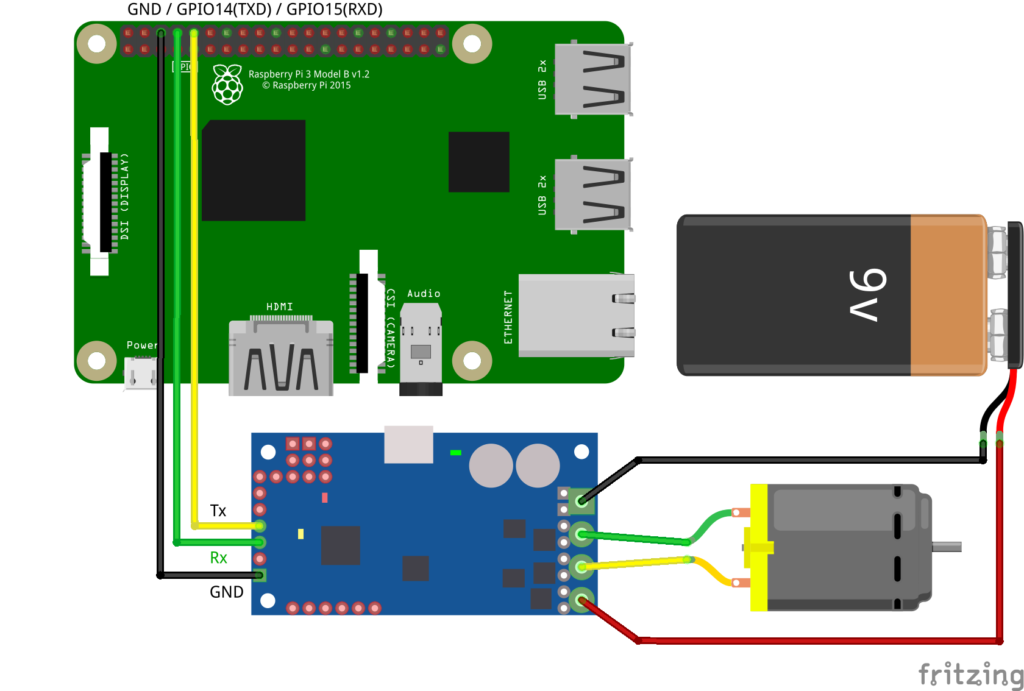
Raspberry Piとシンプルモータコントローラを、Raspberry Pi拡張ポートからTTLシリアルで接続します。
- シンプルモータコントローラG2 Rx / Raspberry Pi TXD (GPIO14)
- シンプルモータコントローラG2 Tx / Raspberry Pi RXD (GPIO15)
- GND
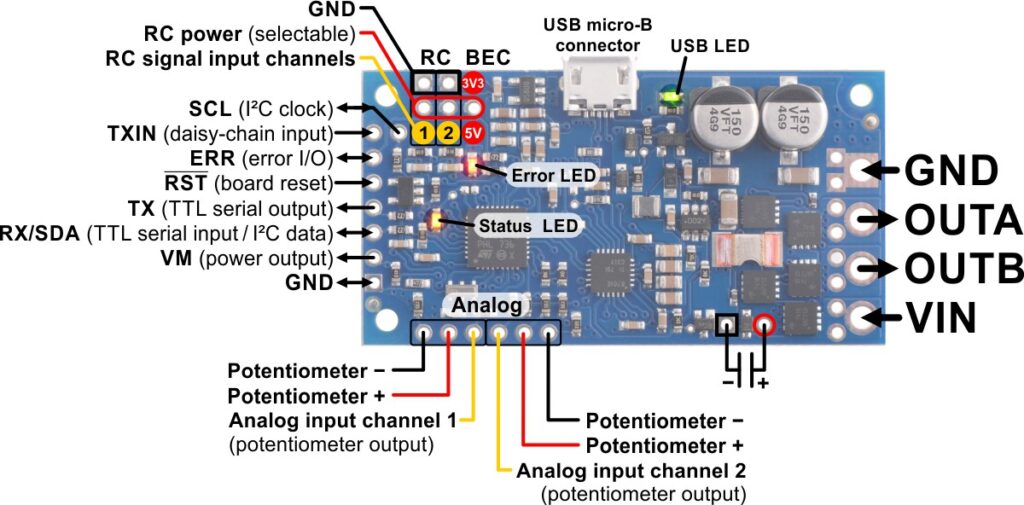
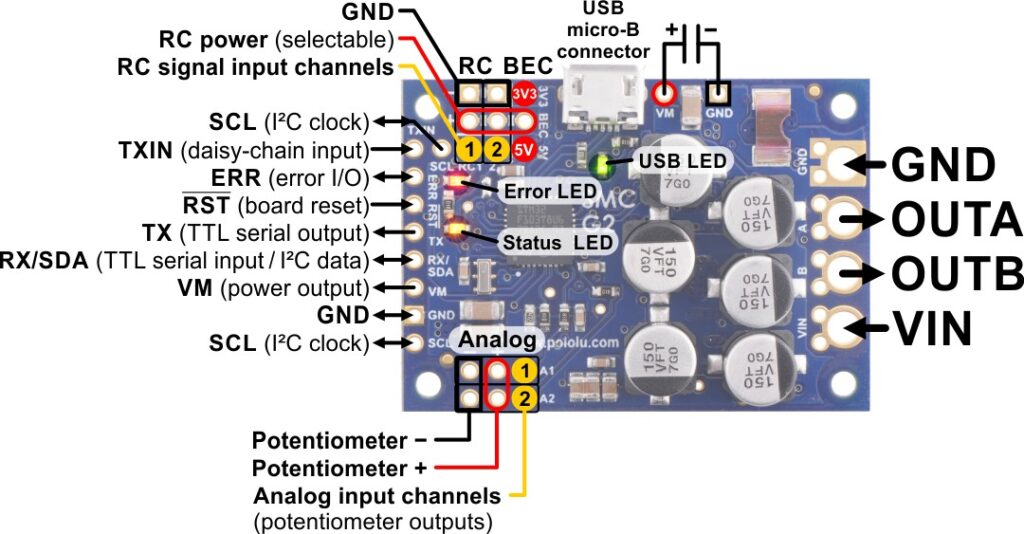
18v15/24v12と18v25/24v19で配置がすこし違いますが、ボードの左にあるRX/SDA、TXとGNDへ接続します。
TTLシリアルで接続したとき、Raspberry Piのシリアルポートは、/dev/ttyAMA0 になります。
Raspberry Piから、TTLシリアルをアプリケーションで使用するために、次の設定をRaspberry Piで行ってください。
- sudo raspi-config
- Interfacing options sudo raspi-config から、P6. Serial を選択
- login shellに使用するか聞かれるので、No を選択
- ハードウェアシリアルポートを有効にするか聞かれるので、Yes を選択
- BluetoothのUART設定の解除(pi3-disable-bt)
- sudo systemctl disable hciuart
シリアル通信へ設定
Simple Motor Control Center G2から設定します。 インストールがまだの時は、導入編をご覧ください。
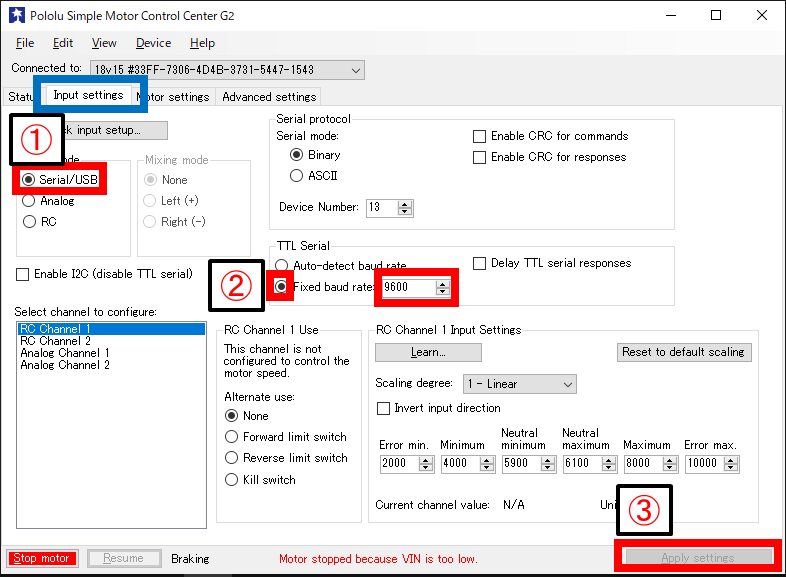
Input settingsタブを開き設定していきます。
- Input ModeでSerial/USBを選択
- TTL Serialの Fixed baud rate: を選択し 9600を入力
- Apply Settingsをクリック
サンプルコード中で、baud rateを指定しているため、9600にしてください。他の速度で使用する場合は、サンプルコードの速度指定を変更してください。
サンプルコード
基本的な、正転と逆転制御するサンプルコードです。
# pySerialライブラリを使用し、シンプルモータコントローラG2から送受信を行います。
#
# 注意: シンプルモータコントローラG2の入力モードを Serial/USB に必ずしてください。
# 注意: "port_name =" の行をシリアルポートに応じて変更する必要があります。
import serial
class SmcG2Serial(object):
def __init__(self, port, device_number=None):
self.port = port
self.device_number = device_number
def send_command(self, cmd, *data_bytes):
if self.device_number == None:
header = [cmd] # Compact protocol
else:
header = [0xAA, device_number, cmd & 0x7F] # Pololu protocol
self.port.write(bytes(header + list(data_bytes)))
# セーフスタート終了コマンド送信
# モータを動作させるために必要
def exit_safe_start(self):
self.send_command(0x83)
# SMC ターゲット速度設定 (-3200 ~ 3200)
def set_target_speed(self, speed):
cmd = 0x85 # Motor forward
if speed < 0:
cmd = 0x86 # Motor reverse
speed = -speed
self.send_command(cmd, speed & 0x1F, speed >> 5 & 0x7F)
# 指定した変数IDの値を 符号無し整数 で取得
def get_variable(self, id):
self.send_command(0xA1, id)
result = self.port.read(2)
if len(result) != 2:
raise RuntimeError("Expected to read 2 bytes, got {}."
.format(len(result)))
b = bytearray(result)
return b[0] + 256 * b[1]
# 指定した変数IDの値を 符号付き整数 で取得
def get_variable_signed(self, id):
value = self.get_variable(id)
if value >= 0x8000:
value -= 0x10000
return value
# ターゲット速度取得 (-3200 ~ 3200)
def get_target_speed(self):
return self.get_variable_signed(20)
# 異なるエラーの各ビット表示の数値を取得
# ビットが「1」の時は、現在もエラーが有効
# エラービットの定義はユーザガイドを参照
def get_error_status(self):
return self.get_variable(0)
# シリアルポート名の指定
# Linux USB example: "/dev/ttyACM0" (see also: /dev/serial/by-id)
# Raspberry Pi USB example: "/dev/ttyUSB0"
# Raspberry Pi TTL example: "/dev/ttyAMA0"
# macOS USB example: "/dev/cu.usbmodem001234562"
# Windows example: "COM6"
port_name = "/dev/ttyUSB0"
# ボーレート設定 (bits per second).
# USB経由でSMCに接続しているときは、この値は関係ありません。
# Tx/Rxラインで接続している場合は、SMCのシリアル設定のボーレートと同じにしてください。
baud_rate = 9600
# SMCのデバイス番号を0~127の間で変更してください。
# 複数のSMCをシリアルに接続し Pololu Protocolを使用しているときに使用します。
device_number = None
port = serial.Serial(port_name, baud_rate, timeout=0.1, write_timeout=0.1)
smc = SmcG2Serial(port, device_number)
smc.exit_safe_start()
error_status = smc.get_error_status()
print("Error status: 0x{:04X}".format(error_status))
target_speed = smc.get_target_speed()
print("Target speed is {}.".format(target_speed))
new_speed = 3200 if target_speed <= 0 else -3200
print("Setting target speed to {}.\n".format(new_speed));
smc.set_target_speed(new_speed)