
2022年5月4日
Pololu ハイパワーシンプルモータコントローラG2
Linux I2C Pythonサンプル(Raspberry Pi)
シンプルモータコントローラG2のI2C通信を使い、Raspberry Piでモータ制御をします。
I2C動作モード
- I2C デバイス番号 13
- バイナリコマンド方式
- CRC無効モード
Pythonで、smbus2ライブラリを使用しています。Raspberry Piでの設定は接続の時の説明をご覧ください。
smbus2のインストールがまだの時は、次のコマンドでインストールしてください。
pip install smbus2
pip3 install smbus2
Raspberry Piと接続
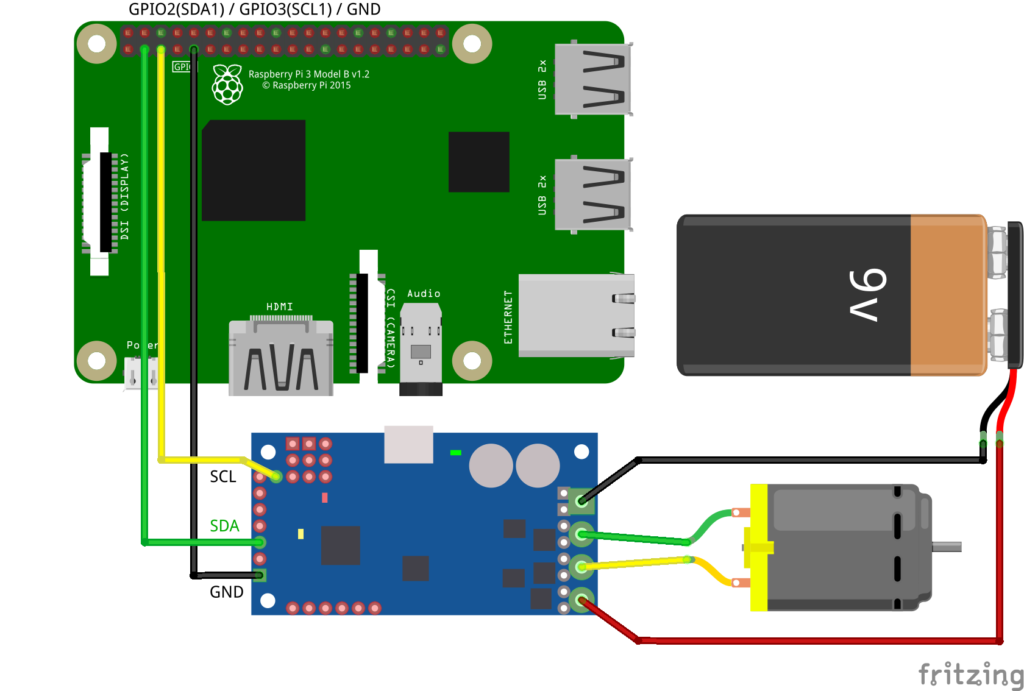
Raspberry Piとシンプルモータコントローラを、Raspberry Pi拡張ポートからI2Cで接続します。
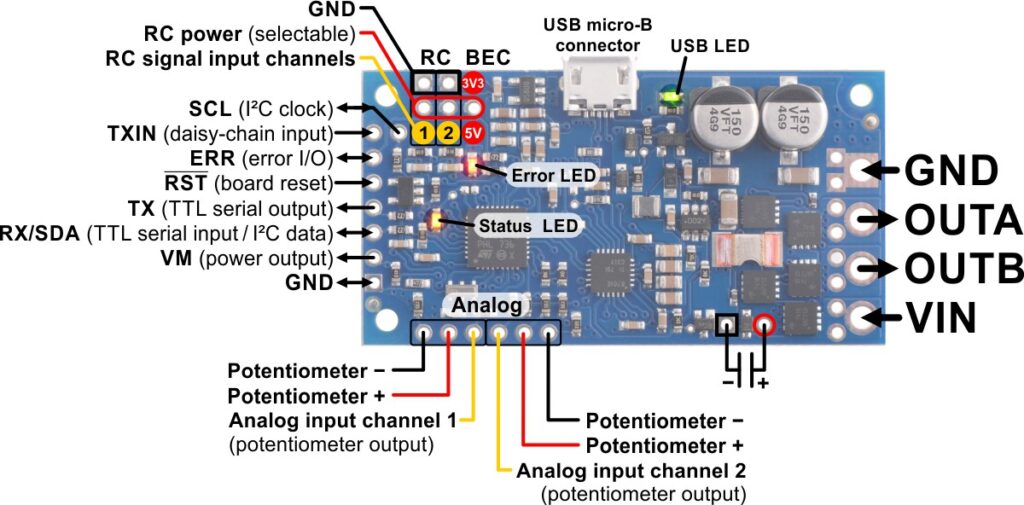
- シンプルモータコントローラG2 Rx / Raspberry Pi SDA1 (GPIO2)
- シンプルモータコントローラG2 Tx / Raspberry Pi SCL1 (GPIO3)
- GND
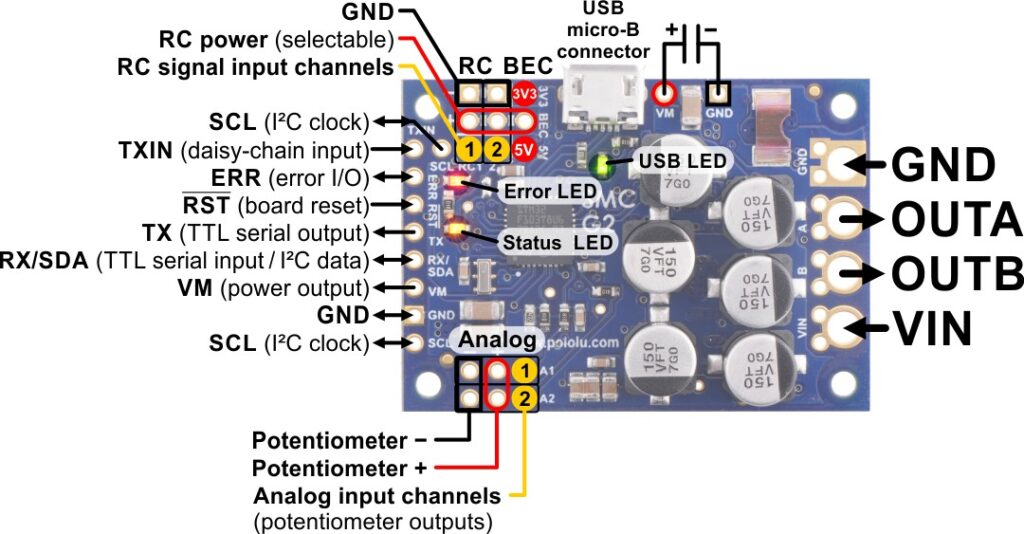
18v15/24v12と18v25/24v19で配置がすこし違いますが、ボードの左にあるRX/SDA、SCLとGNDへ接続します。(18v25/24v19は、SCLが2箇所ありますがどちらに接続しても大丈夫です。)
I2C通信へ設定
Simple Motor Control Center G2から設定します。 インストールがまだの時は、導入編をご覧ください。
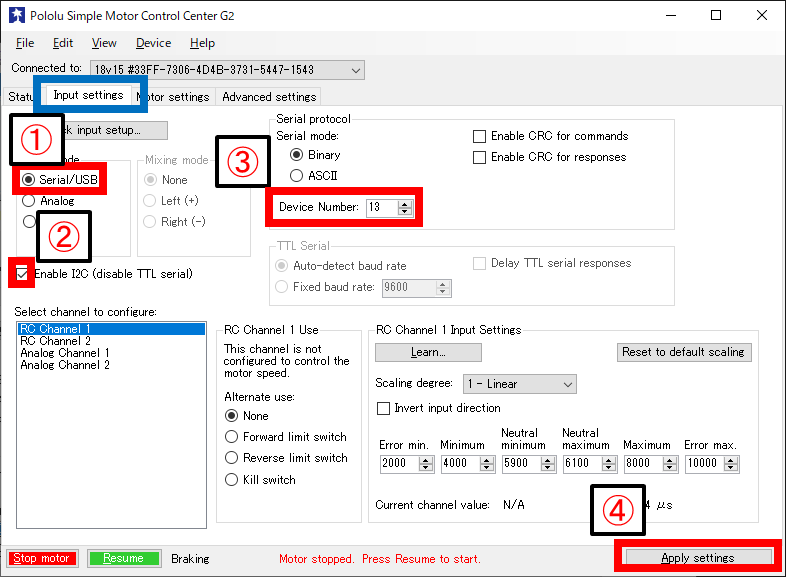
Input settingsタブを開き設定していきます。
- Input ModeでSerial/USBを選択
- Enable I2C (disable TTL serial) にチェック
- Device Numberに 13 を入力 (標準 13)
- Apply Settingsをクリック
Device Numberを変更することで、複数台のシンプルモータコントローラG2を制御できます。
Raspberry Pi のI2C設定
I2Cポートを有効にする
sudo raspi-config
Advanced Optionsを選択し、I2Cを選んで enable(有効) にしてください。
ライブラリとツールのインストール
sudo apt-get install python-smbus i2c-tools sudo reboot
インストールして、再起動をしてください。
I2C接続の確認
sudo i2cdetect -y 1
接続されていたら、デバイス番号が表示されます。
サンプルコード
基本的な、正転と逆転制御するサンプルコードです。
# smbus2ライブラリを使用し、シンプルモータコントローラG2から送受信を行います。
# Linux上の Python 2 と Python 3 で動作します
#
# シンプルモータコントローラG2の入力モードを Serial/USB にしてください。
# Enable I2C を必ず設定してください。
#
# 注意: "SMBus(1)" の行を、正しいI2Cバスデバイスに変更する必要があります。
# 注意: "address = 13" の行を、正しいデバイス番号に変更する必要があります。(標準 13)
from smbus2 import SMBus, i2c_msg
class SmcG2I2C(object):
def __init__(self, bus, address):
self.bus = bus
self.address = address
# セーフスタート終了コマンド送信
# モータを動作させるために必要
def exit_safe_start(self):
write = i2c_msg.write(self.address, [0x83])
self.bus.i2c_rdwr(write)
# SMC ターゲット速度設定 (-3200 ~ 3200)
def set_target_speed(self, speed):
cmd = 0x85 # Motor forward
if speed < 0:
cmd = 0x86 # Motor reverse
speed = -speed
buffer = [cmd, speed & 0x1F, speed >> 5 & 0x7F]
write = i2c_msg.write(self.address, buffer)
self.bus.i2c_rdwr(write)
# 指定した変数IDの値を 符号無し整数 で取得
def get_variable(self, id):
write = i2c_msg.write(self.address, [0xA1, id])
read = i2c_msg.read(self.address, 2)
self.bus.i2c_rdwr(write, read)
b = list(read)
return b[0] + 256 * b[1]
# 指定した変数IDの値を 符号付き整数 で取得
def get_variable_signed(self, id):
value = self.get_variable(id)
if value >= 0x8000:
value -= 0x10000
return value
# ターゲット速度取得 (-3200 ~ 3200)
def get_target_speed(self):
return self.get_variable_signed(20)
# 異なるエラーの各ビット表示の数値を取得
# ビットが「1」の時は、現在もエラーが有効
# エラービットの定義はユーザガイドを参照
def get_error_status(self):
return self.get_variable(0)
# I2Cバスの "/dev/i2c-1" をオープン (Raspberry Pi だと SMBus(1) が標準)
bus = SMBus(1)
# SMB I2Cアドレスを選択 (デバイス番号)
address = 13
smc = SmcG2I2C(bus, address)
smc.exit_safe_start()
error_status = smc.get_error_status()
print("Error status: 0x{:04X}".format(error_status))
target_speed = smc.get_target_speed()
print("Target speed is {}.".format(target_speed))
new_speed = 3200 if target_speed <= 0 else -3200
print("Setting target speed to {}.\n".format(new_speed));
smc.set_target_speed(new_speed)
おわりに
シンプルモータコントローラG2を使い、いろいろなインタフェースから基本的なモータ制御をやってみました。
モータを簡単に制御できるように複数のインタフェースに対応し、強力なモータドライバを搭載したシンプルモータコントローラG2です。今回は、1台で制御しましたが、R/Cやマイコンなどから複数台のモータコントローラを制御する方法もあり、多くのモータを制御するときにも便利です。
より詳細な使い方は、ユーザガイド(英語版)に紹介されていますのでご覧ください。